विषय
- कदम
- 3 का भाग 1 : तात्कालिक वेग की गणना
- 3 का भाग 2: तात्कालिक गति का आलेखीय अनुमान
- 3 का भाग 3: उदाहरण
- टिप्स
गति वह गति है जिससे कोई वस्तु किसी निश्चित दिशा में गति करती है। सामान्य उद्देश्यों के लिए, किसी वस्तु की गति (v) का पता लगाना एक सरल कार्य है: आपको विस्थापन (ओं) को एक निश्चित समय (s) में इस समय (t) से विभाजित करने की आवश्यकता है, अर्थात, सूत्र v = s का उपयोग करें। / टी। हालांकि, इस तरह, शरीर की औसत गति प्राप्त की जाती है। कुछ गणनाओं का उपयोग करके, आप पथ के किसी भी बिंदु पर शरीर की गति का पता लगा सकते हैं। इस गति को कहा जाता है तत्काल गति और सूत्र द्वारा गणना की जाती है वी = (डीएस) / (डीटी), अर्थात्, यह शरीर की औसत गति की गणना के लिए सूत्र का व्युत्पन्न है।
कदम
3 का भाग 1 : तात्कालिक वेग की गणना
 1 समीकरण से शुरू करें। तात्कालिक वेग की गणना करने के लिए, शरीर की गति (समय में एक निश्चित क्षण में इसकी स्थिति) का वर्णन करने वाले समीकरण को जानना आवश्यक है, अर्थात, एक तरफ ऐसा समीकरण है जो s (शरीर की गति) है। और दूसरी ओर चर t (समय) वाले पद हैं। उदाहरण के लिए:
1 समीकरण से शुरू करें। तात्कालिक वेग की गणना करने के लिए, शरीर की गति (समय में एक निश्चित क्षण में इसकी स्थिति) का वर्णन करने वाले समीकरण को जानना आवश्यक है, अर्थात, एक तरफ ऐसा समीकरण है जो s (शरीर की गति) है। और दूसरी ओर चर t (समय) वाले पद हैं। उदाहरण के लिए: एस = -1.5t + 10t + 4
- इस समीकरण में:
- हटो = s... गति वस्तु द्वारा तय किया गया पथ है। उदाहरण के लिए, यदि शरीर 10 मीटर आगे और 7 मीटर पीछे चला गया है, तो शरीर की कुल गति 10 - 7 = 3मी (और 10 + 7 = 17 मीटर पर)।
- समय = टी... आमतौर पर सेकंड में मापा जाता है।
- इस समीकरण में:
 2 समीकरण के व्युत्पन्न की गणना करें। एक पिंड की तात्कालिक गति को खोजने के लिए जिसका विस्थापन उपरोक्त समीकरण द्वारा वर्णित है, आपको इस समीकरण के व्युत्पन्न की गणना करने की आवश्यकता है। व्युत्पन्न एक समीकरण है जो किसी भी बिंदु (किसी भी समय) पर ग्राफ के ढलान की गणना करता है। व्युत्पन्न खोजने के लिए, फ़ंक्शन को निम्नानुसार अलग करें: यदि y = a * x, तो अवकलज = a * n * x... यह नियम बहुपद के प्रत्येक सदस्य पर लागू होता है।
2 समीकरण के व्युत्पन्न की गणना करें। एक पिंड की तात्कालिक गति को खोजने के लिए जिसका विस्थापन उपरोक्त समीकरण द्वारा वर्णित है, आपको इस समीकरण के व्युत्पन्न की गणना करने की आवश्यकता है। व्युत्पन्न एक समीकरण है जो किसी भी बिंदु (किसी भी समय) पर ग्राफ के ढलान की गणना करता है। व्युत्पन्न खोजने के लिए, फ़ंक्शन को निम्नानुसार अलग करें: यदि y = a * x, तो अवकलज = a * n * x... यह नियम बहुपद के प्रत्येक सदस्य पर लागू होता है। - दूसरे शब्दों में, चर t वाले प्रत्येक पद का अवकलज गुणनफल (चर के सामने) के गुणनफल के बराबर होता है और चर की शक्ति को चर से गुणा करके मूल शक्ति माइनस 1 के बराबर घात के बराबर होता है। टर्म (बिना वेरिएबल वाला टर्म, यानी एक नंबर) गायब हो जाता है क्योंकि इसे 0 से गुणा किया जाता है। हमारे उदाहरण में:
एस = -1.5t + 10t + 4
(2) -1.5t + (1) 10t + (0) 4t
-3t + 10t
-3t + 10
- दूसरे शब्दों में, चर t वाले प्रत्येक पद का अवकलज गुणनफल (चर के सामने) के गुणनफल के बराबर होता है और चर की शक्ति को चर से गुणा करके मूल शक्ति माइनस 1 के बराबर घात के बराबर होता है। टर्म (बिना वेरिएबल वाला टर्म, यानी एक नंबर) गायब हो जाता है क्योंकि इसे 0 से गुणा किया जाता है। हमारे उदाहरण में:
 3 "s" को "ds / dt" से बदलें यह इंगित करने के लिए कि नया समीकरण मूल समीकरण का व्युत्पन्न है (अर्थात, s, t का व्युत्पन्न है)। व्युत्पन्न एक विशिष्ट बिंदु (समय में एक विशिष्ट बिंदु पर) पर ग्राफ का ढलान है। उदाहरण के लिए, लाइन s = -1.5t + 10t + 4 का t = 5 पर ढलान खोजने के लिए, बस 5 को व्युत्पन्न समीकरण में प्लग करें।
3 "s" को "ds / dt" से बदलें यह इंगित करने के लिए कि नया समीकरण मूल समीकरण का व्युत्पन्न है (अर्थात, s, t का व्युत्पन्न है)। व्युत्पन्न एक विशिष्ट बिंदु (समय में एक विशिष्ट बिंदु पर) पर ग्राफ का ढलान है। उदाहरण के लिए, लाइन s = -1.5t + 10t + 4 का t = 5 पर ढलान खोजने के लिए, बस 5 को व्युत्पन्न समीकरण में प्लग करें। - हमारे उदाहरण में, व्युत्पन्न समीकरण इस तरह दिखना चाहिए:
डीएस / डीटी = -3 टी + 10
- हमारे उदाहरण में, व्युत्पन्न समीकरण इस तरह दिखना चाहिए:
 4 किसी विशेष समय बिंदु पर तात्क्षणिक वेग ज्ञात करने के लिए व्युत्पन्न समीकरण में उपयुक्त t मान रखें। उदाहरण के लिए, यदि आप t = 5 पर तात्कालिक वेग ज्ञात करना चाहते हैं, तो बस 5 (t के बजाय) को व्युत्पन्न समीकरण ds / dt = -3 + 10 में प्लग करें। फिर समीकरण को हल करें:
4 किसी विशेष समय बिंदु पर तात्क्षणिक वेग ज्ञात करने के लिए व्युत्पन्न समीकरण में उपयुक्त t मान रखें। उदाहरण के लिए, यदि आप t = 5 पर तात्कालिक वेग ज्ञात करना चाहते हैं, तो बस 5 (t के बजाय) को व्युत्पन्न समीकरण ds / dt = -3 + 10 में प्लग करें। फिर समीकरण को हल करें:डीएस / डीटी = -3 टी + 10
डीएस / डीटी = -3 (5) + 10
डीएस / डीटी = -15 + 10 = -5 एम / एस- तात्कालिक गति मापने की इकाई पर ध्यान दें: मी / से। चूंकि हमें मीटर में विस्थापन का मान दिया गया है, और समय सेकंड में है, और गति समय के साथ विस्थापन के अनुपात के बराबर है, माप की इकाई एम / एस सही है।
3 का भाग 2: तात्कालिक गति का आलेखीय अनुमान
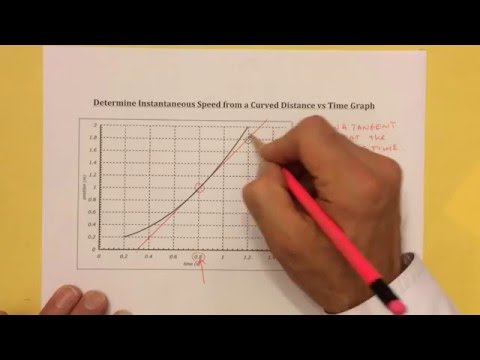
 1 शरीर की गति को प्लॉट करें। पिछले अध्याय में, आपने एक सूत्र का उपयोग करके तात्कालिक वेग की गणना की थी (व्युत्पन्न समीकरण जो आपको किसी विशेष बिंदु पर ग्राफ के ढलान को खोजने की अनुमति देता है)। पिंड की गति का एक ग्राफ बनाकर, आप किसी भी बिंदु पर इसका ढलान पा सकते हैं, और इसलिए समय में एक निश्चित बिंदु पर तात्कालिक गति निर्धारित करें.
1 शरीर की गति को प्लॉट करें। पिछले अध्याय में, आपने एक सूत्र का उपयोग करके तात्कालिक वेग की गणना की थी (व्युत्पन्न समीकरण जो आपको किसी विशेष बिंदु पर ग्राफ के ढलान को खोजने की अनुमति देता है)। पिंड की गति का एक ग्राफ बनाकर, आप किसी भी बिंदु पर इसका ढलान पा सकते हैं, और इसलिए समय में एक निश्चित बिंदु पर तात्कालिक गति निर्धारित करें. - Y-अक्ष गति है, और X-अक्ष समय है। बिंदुओं (x, y) के निर्देशांक मूल विस्थापन समीकरण में t के विभिन्न मानों को प्रतिस्थापित करके और s के संगत मानों की गणना करके प्राप्त किए जाते हैं।
- ग्राफ X-अक्ष के नीचे गिर सकता है।यदि पिंड की गति का ग्राफ X-अक्ष से नीचे आता है, तो इसका अर्थ है कि पिंड गति के मूल बिंदु से विपरीत दिशा में गति कर रहा है। एक नियम के रूप में, ग्राफ वाई-अक्ष (ऋणात्मक एक्स-मान) से आगे नहीं बढ़ता है - हम समय में पीछे की ओर बढ़ने वाली वस्तुओं की गति को नहीं मापते हैं!
 2 ग्राफ़ (वक्र) पर बिंदु P और उसके निकट बिंदु Q का चयन करें। बिंदु P पर ग्राफ का ढलान ज्ञात करने के लिए, हम सीमा की अवधारणा का उपयोग करते हैं। सीमा - एक ऐसी अवस्था जिसमें वक्र पर स्थित 2 बिंदुओं P और Q से खींची गई छेदक का मान शून्य हो जाता है।
2 ग्राफ़ (वक्र) पर बिंदु P और उसके निकट बिंदु Q का चयन करें। बिंदु P पर ग्राफ का ढलान ज्ञात करने के लिए, हम सीमा की अवधारणा का उपयोग करते हैं। सीमा - एक ऐसी अवस्था जिसमें वक्र पर स्थित 2 बिंदुओं P और Q से खींची गई छेदक का मान शून्य हो जाता है। - उदाहरण के लिए, बिंदुओं पर विचार करें पी (1,3) तथा क्यू (4.7) और बिंदु P पर तात्कालिक वेग की गणना करें।
 3 रेखाखंड PQ का ढाल ज्ञात कीजिए। खंड PQ का ढलान बिंदु P और Q के निर्देशांक "y" के मानों में अंतर के अनुपात के बराबर है और बिंदुओं P के निर्देशांक "x" के मानों में अंतर है और प्र. दूसरे शब्दों में, एच = (वाईक्यू - आपपी) / (एक्सक्यू - एक्सपी), जहाँ H खण्ड PQ का ढाल है। हमारे उदाहरण में, खंड PQ का ढलान है:
3 रेखाखंड PQ का ढाल ज्ञात कीजिए। खंड PQ का ढलान बिंदु P और Q के निर्देशांक "y" के मानों में अंतर के अनुपात के बराबर है और बिंदुओं P के निर्देशांक "x" के मानों में अंतर है और प्र. दूसरे शब्दों में, एच = (वाईक्यू - आपपी) / (एक्सक्यू - एक्सपी), जहाँ H खण्ड PQ का ढाल है। हमारे उदाहरण में, खंड PQ का ढलान है:एच = (वाईक्यू - आपपी) / (एक्सक्यू - एक्सपी)
एच = (7 - 3) / (4 - 1)
एच = (4) / (3) = 1.33 4 Q बिंदु को P बिंदु के करीब लाते हुए इस प्रक्रिया को कई बार दोहराएं। दो बिंदुओं के बीच की दूरी जितनी छोटी होगी, प्राप्त खंडों का ढलान बिंदु P पर ग्राफ के ढलान के जितना करीब होगा। हमारे उदाहरण में, हम निर्देशांक (2,4.8), (1.5,3.95) के साथ बिंदु Q के लिए गणना करेंगे। ) और (1.25,3.49) (बिंदु P के निर्देशांक समान रहते हैं):
4 Q बिंदु को P बिंदु के करीब लाते हुए इस प्रक्रिया को कई बार दोहराएं। दो बिंदुओं के बीच की दूरी जितनी छोटी होगी, प्राप्त खंडों का ढलान बिंदु P पर ग्राफ के ढलान के जितना करीब होगा। हमारे उदाहरण में, हम निर्देशांक (2,4.8), (1.5,3.95) के साथ बिंदु Q के लिए गणना करेंगे। ) और (1.25,3.49) (बिंदु P के निर्देशांक समान रहते हैं):क्यू = (2,4.8): एच = (4.8 - 3) / (2 - 1)
एच = (1.8) / (१) = 1.8
क्यू = (1.5,3.95): एच = (3.95 - 3) / (1.5 - 1)
एच = (.95) / (। 5) = 1.9
क्यू = (1.25,3.49): एच = (3.49 - 3) / (1.25 - 1)
एच = (.49) / (। 25) = 1.96 5 बिंदु P और Q के बीच की दूरी जितनी कम होगी, H का मान बिंदु P पर ग्राफ के ढलान के उतना ही करीब होगा। बिंदु P और Q के बीच एक अत्यंत छोटी दूरी के साथ, H का मान ढलान के बराबर होगा। बिंदु P पर ग्राफ चूंकि हम दो बिंदुओं के बीच अत्यंत छोटी दूरी को माप या गणना नहीं कर सकते हैं, ग्राफिकल विधि बिंदु P पर ग्राफ के ढलान का अनुमानित मान देती है।
5 बिंदु P और Q के बीच की दूरी जितनी कम होगी, H का मान बिंदु P पर ग्राफ के ढलान के उतना ही करीब होगा। बिंदु P और Q के बीच एक अत्यंत छोटी दूरी के साथ, H का मान ढलान के बराबर होगा। बिंदु P पर ग्राफ चूंकि हम दो बिंदुओं के बीच अत्यंत छोटी दूरी को माप या गणना नहीं कर सकते हैं, ग्राफिकल विधि बिंदु P पर ग्राफ के ढलान का अनुमानित मान देती है।- हमारे उदाहरण में, Q से P तक पहुंचने पर, हमें H के निम्नलिखित मान प्राप्त हुए: 1.8; 1.9 और 1.96। चूँकि ये संख्याएँ 2 की ओर प्रवृत्त होती हैं, हम कह सकते हैं कि बिंदु P पर आलेख का ढलान बराबर है 2.
- याद रखें कि किसी दिए गए बिंदु पर ग्राफ का ढलान उस बिंदु पर फ़ंक्शन के व्युत्पन्न (जिसके द्वारा यह ग्राफ बनाया गया है) के बराबर है। ग्राफ समय के साथ एक पिंड की गति को प्रदर्शित करता है और, जैसा कि पिछले भाग में उल्लेख किया गया है, एक पिंड का तात्कालिक वेग इस पिंड की गति के लिए समीकरण के व्युत्पन्न के बराबर है। इस प्रकार, हम कह सकते हैं कि t = 2 पर तात्कालिक गति बराबर होती है 2 एमपीपीएस (यह एक अनुमान है)।
3 का भाग 3: उदाहरण
 1 t = 4 पर तात्कालिक वेग की गणना करें यदि शरीर की गति को समीकरण s = 5t - 3t + 2t + 9 द्वारा वर्णित किया गया है। यह उदाहरण पहले खंड की समस्या के समान है, केवल इस अंतर के साथ कि समीकरण तीसरे क्रम का है (दूसरे का नहीं)।
1 t = 4 पर तात्कालिक वेग की गणना करें यदि शरीर की गति को समीकरण s = 5t - 3t + 2t + 9 द्वारा वर्णित किया गया है। यह उदाहरण पहले खंड की समस्या के समान है, केवल इस अंतर के साथ कि समीकरण तीसरे क्रम का है (दूसरे का नहीं)। - सबसे पहले, हम इस समीकरण के व्युत्पन्न की गणना करते हैं:
एस = 5t - 3t + 2t + 9
एस = (3) 5t - (2) 3t + (1) 2t
15t - 6t + 2t - 6t + 2 - अब हम मान t = 4 को व्युत्पन्न समीकरण में प्रतिस्थापित करते हैं:
एस = 15t - 6t + 2
15(4) - 6(4) + 2
15(16) - 6(4) + 2
240 - 24 + 2 = 22 मी / से
- सबसे पहले, हम इस समीकरण के व्युत्पन्न की गणना करते हैं:
 2 आइए हम फ़ंक्शन s = 4t - t के ग्राफ पर निर्देशांक (1,3) के साथ बिंदु पर तात्कालिक वेग के मान का अनुमान लगाएं। इस मामले में, बिंदु P में निर्देशांक (1,3) हैं और बिंदु P के करीब स्थित बिंदु Q के कई निर्देशांक ढूंढना आवश्यक है। फिर हम H की गणना करते हैं और तात्कालिक वेग के अनुमानित मान पाते हैं।
2 आइए हम फ़ंक्शन s = 4t - t के ग्राफ पर निर्देशांक (1,3) के साथ बिंदु पर तात्कालिक वेग के मान का अनुमान लगाएं। इस मामले में, बिंदु P में निर्देशांक (1,3) हैं और बिंदु P के करीब स्थित बिंदु Q के कई निर्देशांक ढूंढना आवश्यक है। फिर हम H की गणना करते हैं और तात्कालिक वेग के अनुमानित मान पाते हैं। - सबसे पहले, t = 2, 1.5, 1.1 और 1.01 पर Q निर्देशांक ज्ञात कीजिए।
एस = 4t - टी
टी = 2: एस = 4 (2) - (2)
४ (४) - २ = १६ - २ = १४, इसलिए क्यू = (2.14)
टी = 1.5: एस = 4 (1.5) - (1.5)
४ (२.२५) - १.५ = ९ - १.५ = ७.५, इसलिए क्यू = (1.5,7.5)
टी = 1.1: एस = 4 (1.1) - (1.1)
4 (1.21) - 1.1 = 4.84 - 1.1 = 3.74, इसलिए क्यू = (1.1,3.74)
टी = 1.01: एस = 4 (1.01) - (1.01)
4 (1.0201) - 1.01 = 4.0804 - 1.01 = 3.0704, इसलिए क्यू = (1.01,3.0704) - अब एच की गणना करते हैं:
क्यू = (2.14): एच = (14 - 3) / (2 - 1)
एच = (११) / (१) = 11
क्यू = (1.5,7.5): एच = (7.5 - 3) / (1.5 - 1)
एच = (4.5) / (। 5) = 9
क्यू = (1.1,3.74): एच = (3.74 - 3) / (1.1 - 1)
एच = (.74) / (। 1) = 7.3
क्यू = (1.01,3.0704): एच = (3.0704 - 3) / (1.01 - 1)
एच = (.0704) / (. 01) = 7.04 - चूँकि H के प्राप्त मान 7 की ओर प्रवृत्त होते हैं, हम कह सकते हैं कि बिंदु (1.3) पर पिंड का तात्कालिक वेग बराबर है 7 मी / से (अनुमानित मूल्य)।
- सबसे पहले, t = 2, 1.5, 1.1 और 1.01 पर Q निर्देशांक ज्ञात कीजिए।
टिप्स
- त्वरण (समय के साथ गति में परिवर्तन) खोजने के लिए, विस्थापन फ़ंक्शन के व्युत्पन्न प्राप्त करने के लिए पहले भाग से विधि का उपयोग करें। फिर परिणामी व्युत्पन्न का व्युत्पन्न फिर से लें। यह आपको एक निश्चित समय पर त्वरण को खोजने के लिए समीकरण देगा - आपको बस इतना करना है कि उस समय के लिए एक मूल्य में प्लग इन करें।
- x (समय) पर y (विस्थापन) की निर्भरता का वर्णन करने वाला समीकरण बहुत सरल हो सकता है, उदाहरण के लिए: y = 6x + 3. इस मामले में, ढलान स्थिर है और इसे खोजने के लिए आपको व्युत्पन्न लेने की आवश्यकता नहीं है। रेखा रेखांकन के सिद्धांत के अनुसार, उनका ढलान चर x के गुणांक के बराबर है, अर्थात हमारे उदाहरण में = 6।
- गति दूरी के समान है, लेकिन इसकी एक विशिष्ट दिशा है, जो इसे एक सदिश मान बनाती है। विस्थापन ऋणात्मक हो सकता है, जबकि दूरी केवल धनात्मक हो सकती है।



